

|

‘사뿐한 착지’ 제어 기술로 에너지 효율↑
황보제민 KAIST 기계공학과 교수는 25일 이데일리와의 전화 인터뷰에서, 연구팀이 개발한 사족보행 로봇 ‘라이보2’가 마라톤 풀코스를 완주할 수 있었던 핵심 요소로 ‘사뿐한 착지와 보행’을 꼽았다. 라이보2는 지난 17일 경북 상주에서 열린 ‘제22회 상주 곶감 마라톤 대회’에서 풀코스를 완주했다.
그는 보행 로봇의 다리가 차례로 지면에 내딛을 때 충격을 최소화해 에너지 손실을 줄이고 내구성도 높였다고 했다. 덕분에 중간 충전이나 수리 없이 지형이 다양한 야외 환경에서 42.195㎞를 4시간 19분 52초 기록으로 완주할 수 있었다는 것이다. 이는 평균 초속 약 2.7m(시속 약 9.74㎞)로 주행한 셈으로, 중간 레벨의 아마추어 마라토너 페이스와 비슷한 수준이다.
황보 교수는 “기존의 사족보행 로봇들은 네 다리를 강하게 땅에 찍으며 움직였다. 이는 지면과의 접촉 정보를 정확히 인식해 로봇의 제어를 안정적으로 하기 위한 방법”이라고 설명했다. 이어 그는 “하지만 라이보2는 사뿐히 움직여도 지형 정보를 인식할 수 있도록 강화 학습을 통해 제어기를 설계했다. 이를 통해 모션을 최적화하여 에너지 소모를 기존 대비 30~40% 정도 줄일 수 있었다”고 덧붙였다.
|

|
에너지 효율과 내구성 최적화를 위한 고난도 기술력
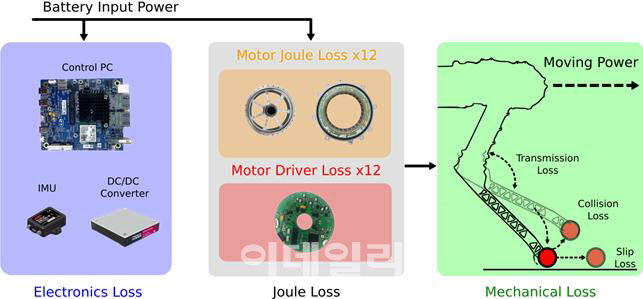
라이보2의 무게는 약 42㎏으로, 여느 사족보행 로봇과 비슷한 수준이다. 이 중 대부분의 중량은 배터리, 즉 몸통 부분이 차지한다. 라이보2는 약 2시간의 일반적인 충전으로 최대 60㎞까지 걷거나 뛸 수 있다. 주행거리를 늘리려면 단순히 시간당 소모 에너지를 줄이는 것이 아니라, 거리당 소모 에너지를 줄이는 것이 핵심이다.
따라서 이차전지의 성능 향상과 경량화가 아직 완전하지 않다면, 로봇의 하드웨어는 보행 시 몸통의 무게와 주기적인 진동을 견디면서 에너지 효율화를 위한 고난도 모션 제어 기술이 핵심 경쟁력이다.
황보 교수 연구팀은 기존의 라이보1을 보완해 라이보2를 새롭게 개발하면서 모든 영역을 최적화하는 데 집중했다. 기존에는 보행 로봇의 에너지 소모 방식에 대한 정보가 부족했기 때문에, 이를 해결하기 위한 연구에 더욱 매진했다. 연구팀은 자체 개발한 ‘라이심(Raisim)’ 시뮬레이션 환경을 활용해 경사로, 계단, 빙판길 등 다양한 환경을 구축하고, 이를 바탕으로 안정적인 보행이 가능하도록 인공지능(AI) 강화 학습 알고리즘을 통해 보행 제어기를 개발했다.
|

자율주행 로봇의 미래를 향한 도전은 이어진다
‘세계 최초 보행 로봇 마라토너’로 데뷔한 카이스트의 라이보2는 인공지능(AI) 기술을 바탕으로 시뮬레이션을 통해 다양한 지형을 미리 학습하고, 환경에 맞는 최적화된 보행 방식을 스스로 판단한다.
그러나 주변 사물을 스스로 인식하고 움직이는 자율주행 로봇은 아니다. 이번 대회에서는 안전사고를 방지하기 위해 조종자, 안전요원, 촬영자, 비상 대기조 등 4명이 한 팀을 이루어 라이보2를 둘러싸고, 4개 팀이 약 10㎞씩 교대로 이어받으며 완주했다.
황보 교수는 “라이보2에 실시간 모션 카메라와 라이다 등을 탑재하면 자율주행 사족보행 로봇이 될 수 있다”며 “휴머노이드와 같은 이족보행 로봇 연구도 진행 중이며, 울퉁불퉁한 산악 환경에서 스스로 본체 밸런스를 유지하며 자율주행하는 보행 로봇 연구를 이어갈 계획”이라고 밝혔다.






![[포토] 이즈나 데뷔](https://spnimage.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112500181t.jpg)
![[포토]첫 싱글 '라스트 벨'로 돌아온 TWS](https://spnimage.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112500118t.jpg)
![[포토] 의원들과 인사나누는 이재명 대표](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112500985t.jpg)
![[포토] 2024 개발협력의 날 기념촬영](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112500978t.jpg)
![[포토]안전운임제 확대 촉구](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112500923t.jpg)
![[포토]허정무 ‘축구협회는 다시 태어나야’](https://spnimage.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112500080t.jpg)
![[포토]가을의 절정](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112500677t.jpg)
![[포토]스테파니 린, 리서치 헤드, 기업거버넌스포럼](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112500657t.jpg)
![[포토] 김재홍 국립중앙박물관장, 상형청자 특별전](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112500648t.jpg)
![[포토]가슴 뛰는 통일 대한민국을 위하여](https://image.edaily.co.kr/images/Photo/files/NP/S/2024/11/PS24112500462t.jpg)




